
(資料圖片)
工程師們在位于克利夫蘭的美國宇航局格倫研究中心的模擬月球操作(SLOPE)實驗室中對最新的VIPER移動性工程測試單元,即月球引力代表單元3(MGRU3),進行了測試。MGRU3具有專門為月球車設計的電機控制器。它是月球車移動系統中的一個關鍵硬件,控制向月球車四個輪子輸送動力的電機。
“與大多數使用油門和制動器來加速和減速所有四個車輪的汽車發動機不同,VIPER的電機控制器使漫游者車輪以駕駛員想要的力量和速度轉動,具有極高的精度,可以實現更好的性能,”位于加州硅谷的NASA艾姆斯研究中心的測試主管和漫游者系統工程師Arno Rogg說。“這些測試使我們能夠驗證漫游車移動系統的性能,并知道它將在月球上運行良好。”
工程師們還利用這些測試來幫助確定漫游車將如何處理月球表面的困難地形條件。
“我們想看看漫游車是否能夠在極端的下沉環境中前進,以及VIPER可能會開得慢多少,或者漫游車會因為棘手的土壤條件而使用多少額外的動力,”艾姆斯研究中心的VIPER風險經理和任務系統工程技術互換負責人Mercedes Herreras-Martinez說。
使用最新的漫游車軟件,工程師們還測試了原型車的“inch-worm”能力。這種特殊的技術是通過以一種特殊的、類似于毛毛蟲的協調方式移動其車輪來幫助漫游車解困。漫游車原型還證明,如果它接近一個對它來說太過陡峭的斜坡,或者如果它曾經失去了對其在月球上的位置的追蹤,它將自主地停止移動。
Rogg說:“我們通過這些測試捕獲了大量的數據,了解當漫游車車輪碾過巖石或在松散的地形上打滑時會發生什么,以及任何傳感器的漂移--當漫游車稍微偏離方向時。”
根據VIPER科學團隊的建議,漫游車原型遇到的所有類似月球的地形和其他危險都被有條不紊地故意放在SLOPE實驗室中。然后,工程測試團隊精心挑選了土壤模擬物,手工挑選了巖石,甚至精心設計了隕石坑的形狀和大小,以逼真地模仿月球南極表面的實際特征。
除了測試漫游車在困難的地形特征上行駛的能力外,另一個目標是測試漫游車在月球地形上的表現,團隊預計漫游車在大多數時候會遇到。
“利用以前月球任務的數據和圖像,我們創建了各種隨機場景來模仿月球表面的地形,在SLOPE傾斜床上散布著不同大小和形狀的隕石坑和巖石,”艾姆斯研究中心的漫游車和任務系統工程實習生 Kevin May說,他領導了這次測試的地形準備。“在VIPER科學團隊的幫助下,他們生成了隕石坑輪廓的切割模板,我們能夠從地形中形成特征,并塑造出比以往更精確的隕石坑。通過再現真實的月球環境,我們可以更好地了解VIPER在月球表面的表現。”
-

當前滾動:隔夜歐美·8月3日
頭條 22-08-03
-

焦點速讀:鄭州高新技術企業后備庫擴容至4500家
頭條 22-08-03
-

前沿資訊!立方風控鳥·早報(8月3日)
頭條 22-08-03
-

今日視點:外交部召見美國駐華大使:中方堅決反對、強烈譴責佩洛西竄訪臺灣
頭條 22-08-03
-

世界動態:臺媒:佩洛西專機降落臺北松山機場,吳釗燮接機
頭條 22-08-03
-

環球通訊!國防部新聞發言人吳謙就佩洛西竄訪臺灣發表談話
頭條 22-08-03
-

環球資訊:東部戰區將在臺島周邊開展一系列聯合軍事行動
頭條 22-08-03
-

熱議:山東萊州緊急通知:陸軍炮兵旅將進行海上軍事訓練,嚴禁進入落彈區域
頭條 22-08-03
-

全球微頭條丨“佩洛西專機”從3.5萬英尺的巡航高度下降
頭條 22-08-02
-

今日聚焦!臺媒稱解放軍殲-16戰機現身巴士海峽,臺軍IDF、“幻影”各4架次升空
頭條 22-08-02
-

焦點!臺媒:佩洛西專機降落臺北松山機場
頭條 22-08-02
-

【世界報資訊】中共中央臺灣工作辦公室就佩洛西竄臺發表聲明
頭條 22-08-02
-

焦點!公告:解放軍4日至7日進行重要軍事演訓行動
頭條 22-08-02
-

-

環球短訊!外國飛行航班信息平臺:“佩洛西專機”信息顯示目的地——臺北
頭條 22-08-02
-

環球今頭條!貴州茅臺:上半年凈利潤297.93億元,同比增長20.85%
頭條 22-08-02
-

-

環球今亮點!臺媒:臺北市警方證實,佩洛西班機今晚10時降落松山機場
頭條 22-08-02
-
今日快訊:立方風控鳥·晚報(8月2日)
頭條 22-08-02
-

全球視訊!央行公布支付體系運行情況:截至一季度末,全國共開立銀行卡93.19億張
頭條 22-08-02
-

當前快播:河南四部門將確定中小微企業名單,自8月起享受職工醫保緩繳政策
頭條 22-08-02
-

天天新消息丨最高可貸80萬、可選組合貸!鄭開住房公積金同城化業務指南公布
頭條 22-08-02
-

熱資訊!北交所金剛石微粉第一股惠豐鉆石:成功研發出培育鉆石產品
頭條 22-08-02
-

播報:洛陽計劃籌建5萬套保障性租賃住房,將優先供應來洛大學生
頭條 22-08-02
-

每日精選:王毅:美方在臺灣問題上背信棄義,只能使其國家信譽進一步破產
頭條 22-08-02
-

全球微資訊!硅烷科技下調A股IPO發行價至4.7元/股,此前上會被暫緩審議
頭條 22-08-02
-
全球關注:財政部修訂高校財務制度,嚴禁新增地方隱性債務
頭條 22-08-02
-

快資訊丨華夏幸福首單產業新城輕資產業務落地,已與平頂山高新區簽署協議
頭條 22-08-02
-

全球熱訊:恒星科技:擬以不動產進行抵押擔保,融資1.5億元
頭條 22-08-02
-

全球信息:嘉興樓市新政:二孩、三孩家庭買新房最高補貼10萬元
頭條 22-08-02
-

全球資訊:中原證券擬發行40億元次級債券,已獲上交所受理
頭條 22-08-02
-

世界播報:"千億房企"數量腰斬!前7月房企拿地規模下降55.6%
頭條 22-08-02
-

微速訊:銀保監會就人身保險產品信息披露管理辦法征求意見
頭條 22-08-02
-
【世界獨家】河南一AAA級平臺公司擬發行50億元小公募,已獲上交所受理
頭條 22-08-02
-

當前熱文:佩洛西此前所乘專機已起飛,目的地未知
頭條 22-08-02
-

全球觀天下!華春瑩:美國挑釁導致臺海局勢升級,美方須負全責
頭條 22-08-02
-
全球新動態:濮陽:市轄各農商銀行分別單列3億元“人才貸”信貸投放計劃
頭條 22-08-02
-

環球消息!信陽市與中南林科大舉行工作交流座談會 推動萬華生態等企業落戶
頭條 22-08-02
-

天天視訊!焦作9個開發區簽約23名英才
頭條 22-08-02
-

觀焦點:投資1.2億!溫氏又一育種場項目簽約
頭條 22-08-02
-

天天日報丨4家央企領導人員及1名央企專職外部董事職務任免
頭條 22-08-02
-

最新資訊:河南省昨日新增本土確診病例2例,新增本土無癥狀感染者67例
頭條 22-08-02
-

全球速讀:起始價5647萬元,鄭州約5.27畝零售商業用地掛牌出讓
頭條 22-08-02
-

每日消息!隔夜歐美·8月2日
頭條 22-08-02
-

訊息:防止挪用,這個城市放大招!公示85個在售樓盤資金監管賬戶
頭條 22-08-02
-
當前快看:建業地產委任鄧高強、及時松為非執行董事
頭條 22-08-02
-
天天快報!立方風控鳥·早報(8月2日)
頭條 22-08-02
-

動態:剛剛公布!河南70地上榜,有你老家嗎?
頭條 22-08-02
-
【天天時快訊】鄭州市金水區上半年經濟總量達千億元
頭條 22-08-02
-

環球微速訊:總投資6290億元!川渝住建領域機會清單發布 | 附523個項目詳情
頭條 22-08-02
-
環球熱議:8月中旬投入運營!鄭州再添一級大型農產品交易市場
頭條 22-08-01
-
世界微資訊!寧德時代副董事長黃世霖辭職,曾毓群兼任總經理
頭條 22-08-01
-
焦點速訊:牽手寧波大學,新鄉延津縣致力打造“中國內陸青蟹之鄉”
頭條 22-08-01
-

百事通!世茂股份:將為子公司3億元借款展期提供擔保
頭條 22-08-01
-
全球簡訊:上海長耘將受讓三暉電氣10.72%股份,仍為其控股股東
頭條 22-08-01































































































































- 天天觀察:NASA的VIPER原型車在測試中通過2022-08-03
- 熱資訊!歐空局EnVision任務計劃讓航天器在2022-08-03
- 環球熱門:俄航天局澄清:并不是“2024年就2022-08-03
- 天天報道:科學家解釋在海底發現的“神秘團2022-08-03
- 當前關注:8月2日河南新增本土無癥狀感染者2022-08-03
- 蘭考發布最新通告:8月3日0時起調整疫情風2022-08-03
- 大河村仰韶文化博物館進入精裝修階段 采用2022-08-03
- 河南省2022年普通高招專科提前批體育專科藝2022-08-03
- 河南省2022年普通高招專科提前批體育專科藝2022-08-03
- 1000千伏南陽—荊門—長沙特高壓線路工程河2022-08-03
- 河南省安全生產委員會發布通知:切實做好高2022-08-03
- 河南省體育局發出文明健身倡議書 廣場舞健2022-08-03
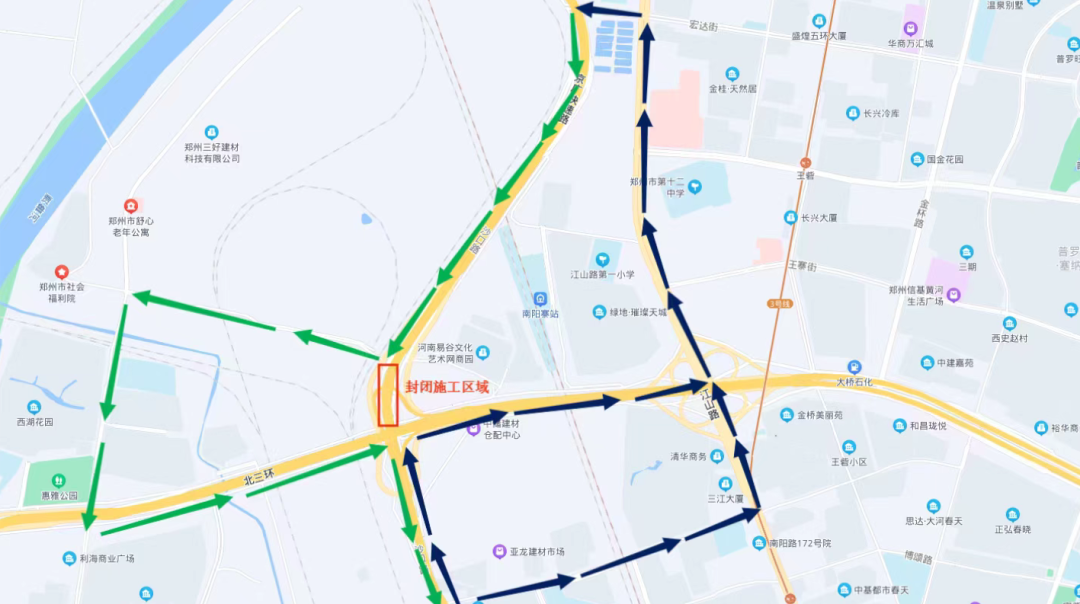
- @鄭州車主 這里即將夜間封閉施工 出行請2022-08-03
- 信陽市加力推進“人人持證技能河南”建設 2022-08-03
- 鄭州市最新出行政策匯總 (8月2日更新)2022-08-03
- 鄭州二七區發布通告:8月3日開展新一輪新冠2022-08-03
- 大貨車請繞行!省道328南召(小張溝至五朵2022-08-03
- 河南省應往屆畢業生青年人才專場招聘會在鄭2022-08-03
- 8月起鄭州市區共享單車違停5次以上將被限制2022-08-03
- 全球通訊!火中取栗者必將玩火自焚2022-08-03
- 天天熱訊:青年執行法官趙鑫:以法為劍 守2022-08-03
- 世界微動態丨當身邊的同齡人開始恐婚2022-08-03
- 當前滾動:隔夜歐美·8月3日2022-08-03
- 焦點速讀:鄭州高新技術企業后備庫擴容至452022-08-03
- 前沿資訊!立方風控鳥·早報(8月3日)2022-08-03
- 今日播報!輝縣市氣象局發布雷暴大風黃色預2022-08-03
- 觀天下!「夏季整治百日行動」漯河交警:持2022-08-03
- 環球微速訊:高溫天氣下 這群人保質保量完2022-08-03
- 【當前獨家】8月2日新疆生產建設兵團第四師2022-08-03
- 全球視點!河南高溫來襲 注意防范2022-08-03
精彩推薦

閱讀排行
- 當前關注:8月2日河南新增本土無癥狀感染者56例
- 大河村仰韶文化博物館進入精裝修階段 采用下沉式的建筑設計屋頂與地面齊平
- 河南省2022年普通高招專科提前批體育專科藝術類專科對口專科8月3日開始投檔
- 河南省安全生產委員會發布通知:切實做好高溫雨季安全防范 保障人民群眾生命財產安全
- 河南省體育局發出文明健身倡議書 廣場舞健步走夏季在21:00前結束
- 河南省應往屆畢業生青年人才專場招聘會在鄭州舉辦 提供崗位7900余個
- 環球微速訊:高溫天氣下 這群人保質保量完成400批次計量監督專項抽查
- 全球視點!河南高溫來襲 注意防范
- 天天熱推薦:大象專訪|惡意剪輯?失了精髓?“花少”總導演回應:我們只是真實記錄和呈現
- 全球今亮點!出門就進“桑拿房”!未來一周河南將迎高溫天氣,體感溫度或超50℃









