(相關資料圖)
(相關資料圖)
(圖自:Chalmers University of Technology)
按照計劃,這艘母艦會投放到海上預定的搜救區域。除了負責打通本地通信和互聯網上行鏈路,它還艦載了計算單元、GNSS 定位導航、以及 IMU 系統。
在從甲板上推出固定翼無人機后,機載的 RGB 與紅外攝像頭能夠用于搜尋掉落于水中的目標,且空中偵查無人機能夠在智能網格算法下高效運作。
若空中無人機檢測到了水中目標,便可將坐標和視頻片段發回 Seacat 中樞,并等待地方當局正式派出救援力量。
確定目標對象是需要救助的人員后,還可排除四軸無人機來實時傳輸視頻,以及投遞救生圈或其它補給品。
等到電量即將耗盡的時候,無人機會自行返航并降落于附近水域、發出廣播信號并等待被取回充電,以便后續重新加入搜救工作。
來自該校查莫斯流體力學系的 Xin Zhao 表示:“得益于不同無人機的優勢,該項目能夠開展多種不同類型的協同工作,以顯著提升搜救效率和救援響應速度、進而挽救更多生命”。
目前 Seacat 已在水上證明了自己的能力,不過項目負責人 Ola Benderius 指出,想要將三無人機概念正式投入運營,可能還需要配備一個速度稍快的海上平臺。
此外一架空中無人機原型已開始從頭打造,且研究人員已測試其四軸飛行器。
該校車輛工程和自主系統系副教授 Benderius 表示:作為擴展項目的一部分,后續他們將把所有系統組合到一起,并于海上對其展開全面的測試。
-

天天亮點!河南昨日新增本土確診病例9例,新增本土無癥狀感染者64例
頭條 22-07-12
-

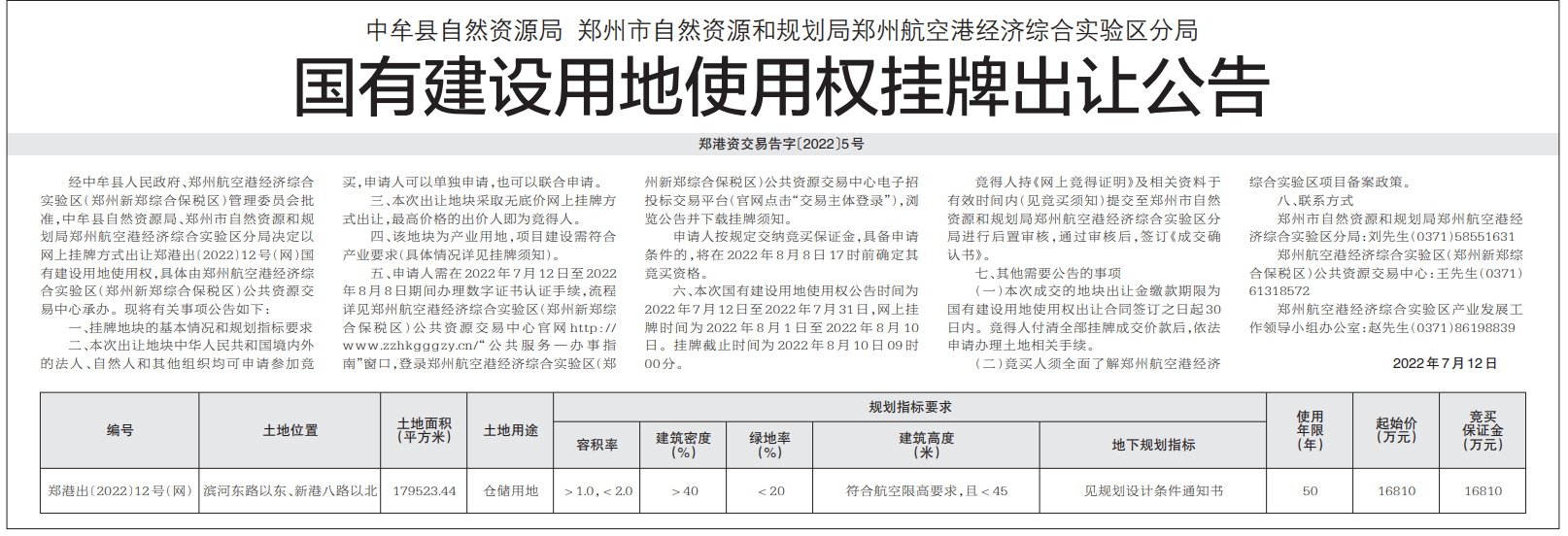
熱訊:起始價1.68億元,鄭州269畝倉儲用地掛牌出讓
頭條 22-07-12
-

每日熱文:河南出臺新政:將動態調整醫療服務價格,醫療機構不得變相提高收費
頭條 22-07-12
-

環球最資訊丨隔夜歐美·7月12日
頭條 22-07-12
-

焦點短訊!多地提高醫保最低繳費年限,男30年女25年,啥信號?
頭條 22-07-12
-

當前資訊!立方風控鳥·早報(7月12日)
頭條 22-07-12
-

全球新動態:開封上半年科技支出7.9億元 設立2000萬元“汴科貸”準備金池
頭條 22-07-12
-

全球報道:河南濮陽國家糧食儲備庫有限公司法人代表常愛國接受監察調查
頭條 22-07-12
-
焦點關注:立方風控鳥·晚報(7月11日)
頭條 22-07-12
-

觀點:中原科技擔保在保余額突破30億元
頭條 22-07-12
-

全球今熱點:鶴壁牽手中國農大 簽約國家玉米改良中心鶴壁研究院
頭條 22-07-12
-

天天熱消息:南陽將與京東合作建設數字經濟產業園、跨境電商綜合試驗區等
頭條 22-07-11
-

熱議:第二個國家植物園來了!華南國家植物園今天揭牌成立
頭條 22-07-11
-

世界訊息:南陽將建智慧冷鏈物流產業園 打造中國冷鏈物流之都
頭條 22-07-11
-

世界快資訊丨南陽市委書記朱是西率團考察現代汽車集團(中國) 推動項目落地
頭條 22-07-11
-

焦點短訊!傅政華被提起公訴
頭條 22-07-11
-

當前熱文:登封市3宗零售商業用地7024萬元出讓,由這家公司競得
頭條 22-07-11
-

當前通訊!河南省昨日新增本土無癥狀感染者12例
頭條 22-07-11
-
前沿資訊!國家衛健委:昨日新增本土確診46例 新增本土無癥狀感染者306例
頭條 22-07-11
-
每日熱議!何雄會見北京云跡科技股份有限公司客人
頭條 22-07-11
-

全球焦點!立方風控鳥·早報(7月11日)
頭條 22-07-11
-
焦點觀察:安偉會見360集團董事長周鴻祎一行
頭條 22-07-11
-

天天快看:到2025年,河南省超90%縣域醫療中心達到三級醫院醫療服務能力水平
頭條 22-07-11
-

每日聚焦:黃河防總、黃委分別啟動黃河防汛四級應急響應和水旱災害防御Ⅳ級應急響應
頭條 22-07-11
-

環球今亮點!融信中國兩筆美元債利息到期未付,合計2786.55萬美元
頭條 22-07-11
-

焦點熱議:河南省線上常態化銀企對接周一見!十余家銀行將圍繞綠色金融產品開講
頭條 22-07-11
-

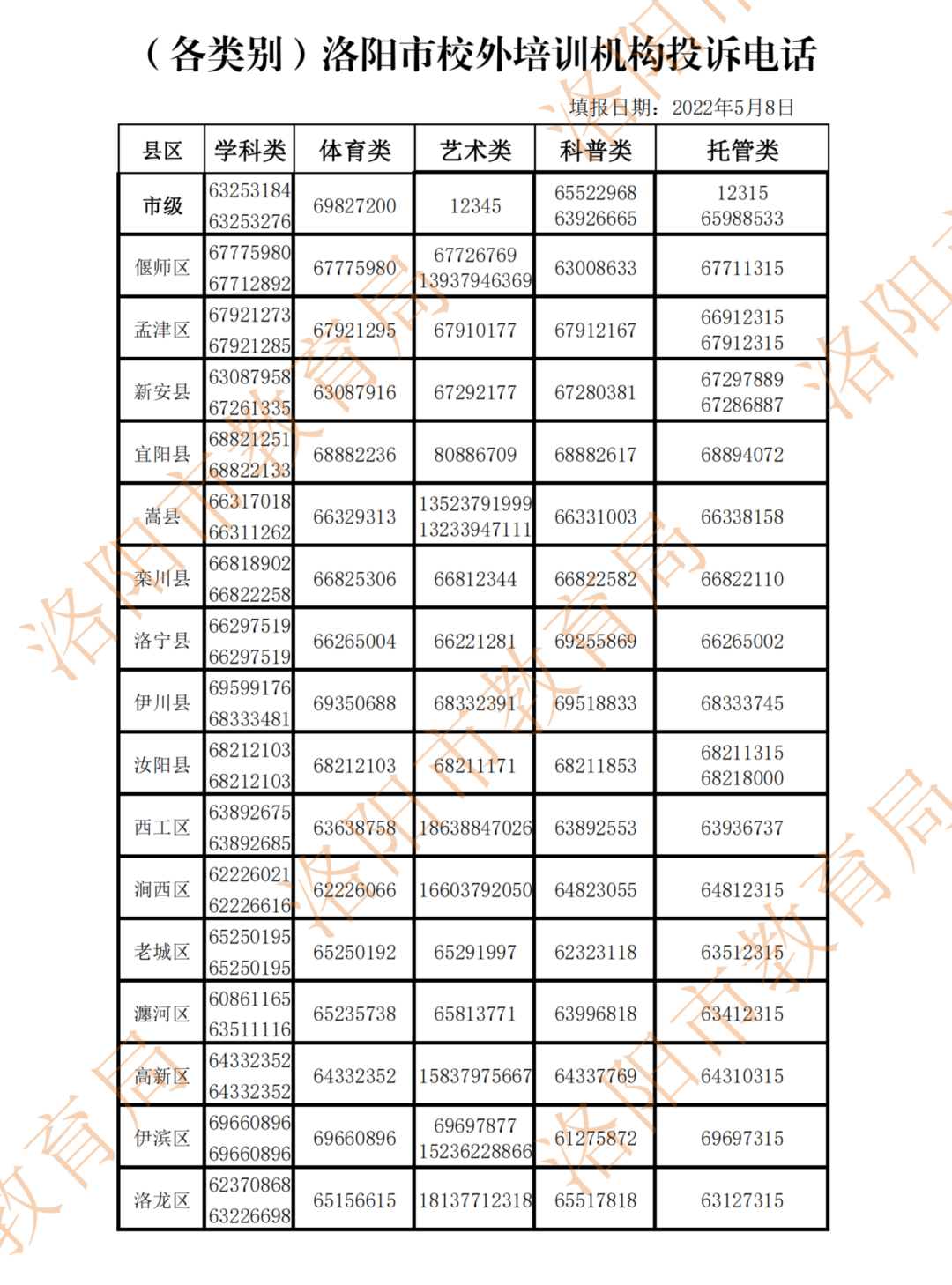
世界聚焦:政校企一體、產學研聯動,洛陽市將打造產教融合高技能創新公共實訓基地
頭條 22-07-11
-

每日速遞:河南銀保監局 河南省地方金融監管局 表示禹州新民生等村鎮銀行風險處置方案即將公布
頭條 22-07-11
-

環球新資訊:山西省公布900家專精特新、小巨人企業 | 名單
頭條 22-07-10
-

當前動態:焦作召開專題會議:研究呼南高鐵豫西通道焦作段建設情況
頭條 22-07-10
-

每日熱訊!劉代軍任鄭州航空工業管理學院院長
頭條 22-07-10
-

當前滾動:河南省昨日新增本土無癥狀感染者4例
頭條 22-07-10
-

世界快資訊:河南省地方金融監管局組織召開金融運行分析座談會
頭條 22-07-10
-
世界滾動:何雄會見三一集團客人
頭條 22-07-10
-
今熱點:鄭州全面推行企業首席質量官制度,力爭2025年重點行業中小微企業聘任率超八成
頭條 22-07-10
-

環球播報:洛陽市委書記江凌與格力電器董事長董明珠一同察看格力在洛產業項目
頭條 22-07-10
-

每日速訊:小米捐贈5億元成立北京市自然科學基金-小米創新聯合基金
頭條 22-07-10
-

天天觀焦點:標品信托業務大增!6月集合信托發行、成立雙雙反彈
頭條 22-07-10
-

快看點丨涉多個管理崗!河南AA+市屬國企擬招10人
頭條 22-07-10
-

全球速訊:正在編制,商丘將新建多條鐵路,形成“米”字型
頭條 22-07-10
-

全球速訊:河南省首個基因檢測試劑盒GMP研發生產基地建成投產
頭條 22-07-10
-

即時看!國家衛健委:昨日新增本土確診病例67例,新增本土無癥狀感染者304例
頭條 22-07-09
-

世界今亮點!6月份居民消費價格同比上漲2.5%,環比持平
頭條 22-07-09
-

世界訊息:今年前5個月河南外資項目數量同比增長21.8%
頭條 22-07-09
-
全球新消息丨隔夜歐美·7月9日
頭條 22-07-09
-
環球通訊!立方風控鳥·早報(7月9日)
頭條 22-07-09
-

全球熱點評!一上市公司擬以污水處理廠作為入池資產申報基礎設施公募REITs
頭條 22-07-09
-

每日快播:河南瑞瀛京宛創業投資基金落地南陽 規模5億元
頭條 22-07-09
-

環球快資訊丨鄭州銀行戰略簽約平頂山市政府 將提供不低于300億元支持
頭條 22-07-09
-
天天觀熱點:深交所發布上市公司信披考核成績單,這家豫股連續八年獲“A”評級
頭條 22-07-09
-

-

【全球新視野】最新!南陽規劃建設臨港產業園
頭條 22-07-08
-
當前消息!1月~6月,許昌保稅物流中心實現進出口總值63774萬元
頭條 22-07-08
-
【世界獨家】總投資近50億元,南陽內鄉縣新簽約7個項目
頭條 22-07-08
-

【天天新視野】百萬千瓦級!全球最大水光互補電站開工建設
頭條 22-07-08













































































































- 天天快看點丨Chalmers研究團隊展示基于艦載2022-07-12
- 環球快訊:如何觀看正飛向地球的巨大彗星C/22022-07-12
- 天天信息:日本正在研究用于月球和火星的人2022-07-12
- 環球今頭條!NASA EZIE任務迎來關鍵里程碑2022-07-12
- 浙江公布2022年退休人員基本養老金調整方案2022-07-12
- 《佛山市城市軌道交通乘客守則》印發 將于2022-07-12
- 廣州地鐵站命名擬加重歷史文化保護分量 “2022-07-12
- 山東省教育招生考試院:高考錄取結果今天能2022-07-12
- 山東省教育招生考試院:高考錄取結果今天能2022-07-12
- 廈門市中考成績有望今晚公布 三種途徑可查2022-07-12
- 廈門市中考成績有望今晚公布 三種途徑可查2022-07-12
- 廈門市今年第1號總河長令簽發 鞏固提升河2022-07-12
- 廈門今年上半年各部門和單位省市重點項目推2022-07-12
- 福建省財政加大獎補力度 鼓勵發展地方優勢2022-07-12
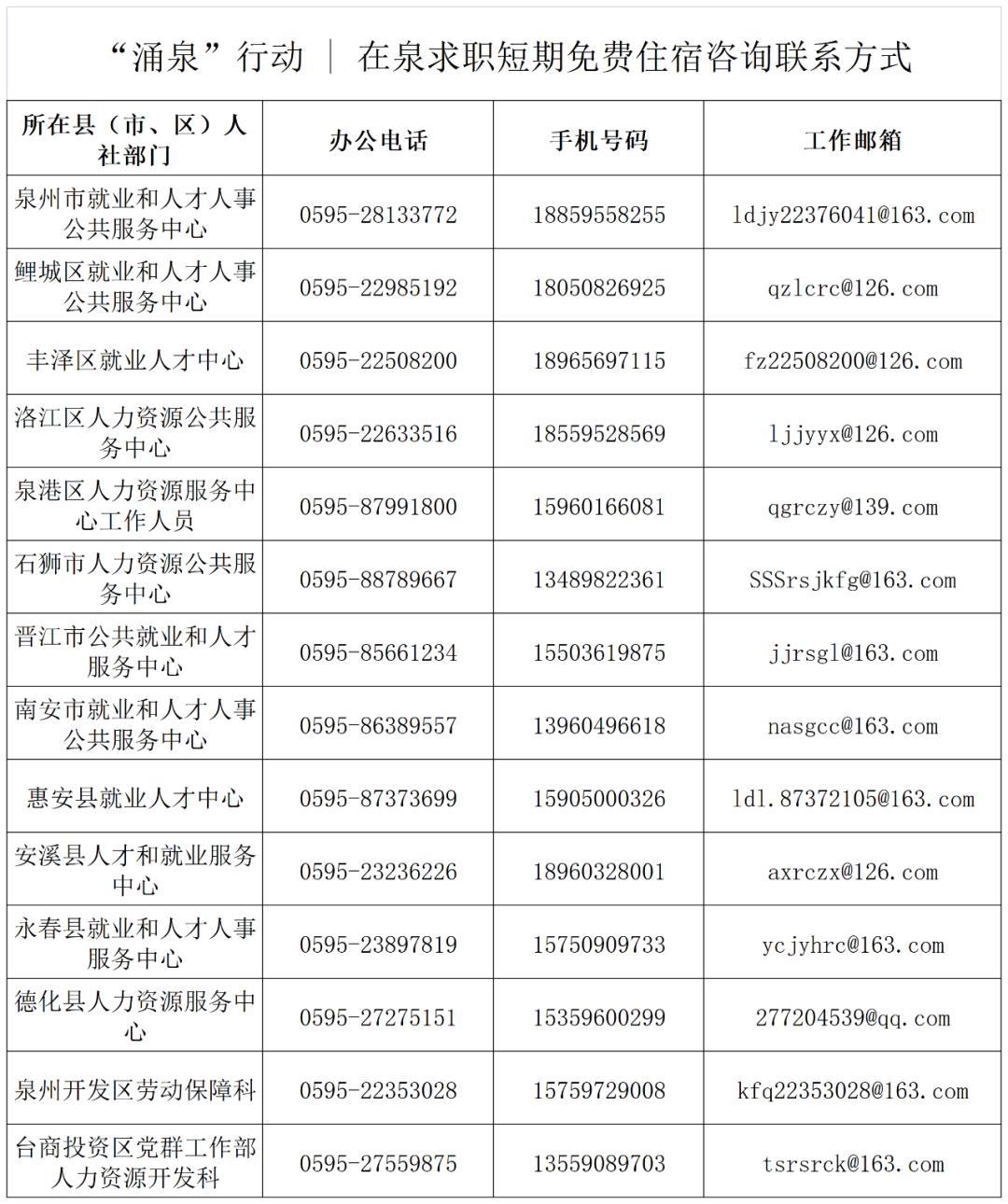
- 泉州人才求職短期免費住宿酒店公寓 申請材2022-07-12
- 福建省消委會提醒消費者:警惕網紅景點“照2022-07-12
- 福建省消委會提醒消費者:警惕網紅景點“照2022-07-12
- 安徽省考試院高招錄取期間開通夜間值班電話2022-07-12
- 安徽省考試院高招錄取期間開通夜間值班電話2022-07-12
- 安徽公布青年創業園扶持政策 最高補助7002022-07-12
- 安徽省2022年普通高校招生提前批次本科院校2022-07-12
- 安徽省2022年普通高校招生提前批次本科院校2022-07-12
- 到2025年蕪湖市新建口袋體育公園不少于72個2022-07-12
- 安徽加快科技成果產業化應用體系建設 到202022-07-12
- 車購稅減半征收政策實施“滿月” 安徽省共2022-07-12
- 前6個月合肥公共資源交易成交額2170.43億元2022-07-12
- 《鄭州市“十四五”現代服務業發展規劃》印2022-07-12
- @鄭州市民 鄭州核酸篩查政策六問六答來了!2022-07-12
- 環球視訊!「今日天氣預報」南陽2022年07月2022-07-12
- 全球看熱訊:「今日天氣預報」商丘2022年072022-07-12
精彩推薦


閱讀排行
- 最新!河南:對4家村鎮銀行賬外業務客戶本金分類分批開展先行墊付工作
- 山東向河南兌現生態補償資金1.26億元 生態“對賭” 沒有輸家
- 河南省普通高中計劃招生906342人 適度擴大中等職業學校招生規模
- 全球快資訊丨7月11日河南新增本土確診病例9例 本土無癥狀感染者64例
- 全球速遞!河南氣象:今日我省淮河以北多地仍有中雨到暴雨
- 河南已有3地報告陽性病例!多地開展核酸檢測加強疫情防控工作
- 本周河南省大部分地區多分散性陣雨 各地須加強防汛備汛
- 你的錄取通知書在路上!河南高考錄取通知書寄遞工作已啟動
- 速看!河南省2022年藝術類本科提前批部分院校征集志愿的通知
- 每日熱文:河南一外賣小哥送餐路上收到研究生錄取通知書